
导数(Derivative)是微积分中的重要基础概念。导数是函数的局部性质。一个函数在某一点的导数描述了这个函数在这一点附近的变化率。如果函数的自变量和取值都是实数的话,函数在某一点的导数就是该函数所代表的曲线在这一点上的切线斜率。导数的本质是通过极限的概念对函数进行局部的线性逼近。例如在运动学中,物体的位移对于时间的导数就是物体的瞬时速度。
导数
定义
设函数y=f(x)在点x0的某个邻域内有定义,当自变量x在x0处有增量Δx,(x0+Δx)也在该邻域内时,相应地函数取得增量Δy=f(x0+Δx)-f(x0);如果Δy与Δx之比当Δx→0时极限存在,则称函数y=f(x)在点x0处可导,并称这个极限为函数y=f(x)在点x0处的导数记作① ;②
;② ;③
;③ , 即
, 即
需要指出的是:
两者在数学上是等价的。
导函数
如果函数y=f(x)在开区间内每一点都可导,就称函数f(x)在区间内可导。这时函数y=f(x)对于区间内的每一个确定的x值,都对应着一个确定的导数值,这就构成一个新的函数,称这个函数为原来函数y=f(x)的导函数,记作y’、f’(x)、dy/dx或df(x)/dx,简称导数。
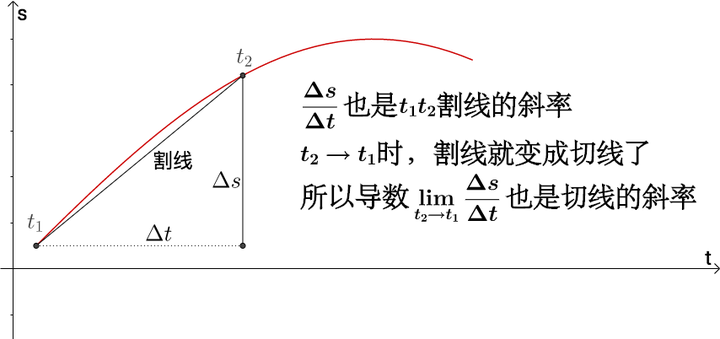
几何意义
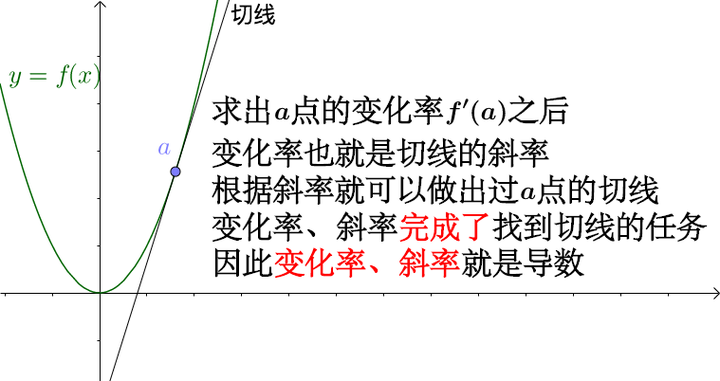
函数y=f(x)在x0点的导数f’(x0)的几何意义:表示函数曲线在点P0(x0,f(x0))处的切线的斜率(导数的几何意义是该函数曲线在这一点上的切线斜率)。
导数的计算
计算已知函数的导函数可以按照导数的定义运用变化比值的极限来计算。在实际计算中,大部分常见的解析函数都可以看作是一些简单的函数的和、差、积、商或相互复合的结果。只要知道了这些简单函数的导函数,那么根据导数的求导法则,就可以推算出较为复杂的函数的导函数。
口诀
为了便于记忆,有人整理出了以下口诀:
常为零,幂降次
对倒数(e为底时直接倒数,a为底时乘以1/lna)
指不变(特别的,自然对数的指数函数完全不变,一般的指数函数须乘以lna)
正变余,余变正
切割方(切函数是相应割函数(切函数的倒数)的平方)
割乘切,反分式
应用
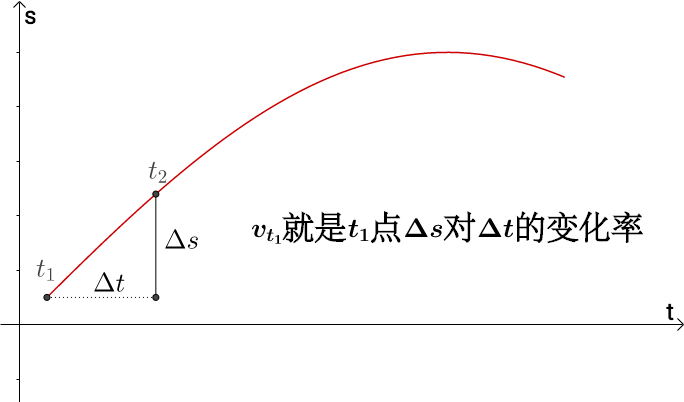
导数与物理,几何,代数关系密切:在几何中可求切线;在代数中可求瞬时变化率;在物理中可求速度、加速度。
导数亦名纪数、微商(微分中的概念),是由速度变化问题和曲线的切线问题(矢量速度的方向)而抽象出来的数学概念,又称变化率。
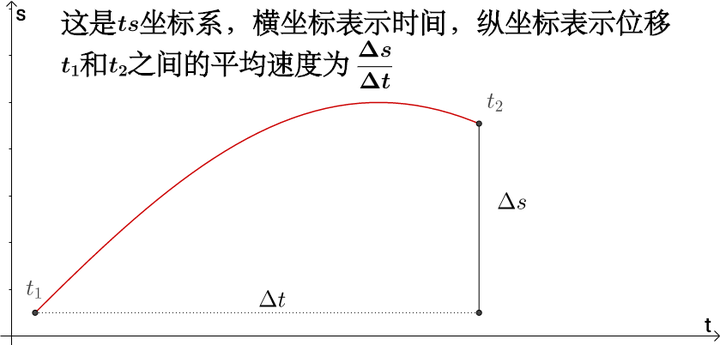
如一辆汽车在10小时内走了 600千米,它的平均速度是60千米/小时。但在实际行驶过程中,是有快慢变化的,不都是60千米/小时。为了较好地反映汽车在行驶过程中的快慢变化情况,可以缩短时间间隔,设汽车所在位置s与时间t的关系为:
那么汽车在由时刻t0变到t1这段时间内的平均速度是:

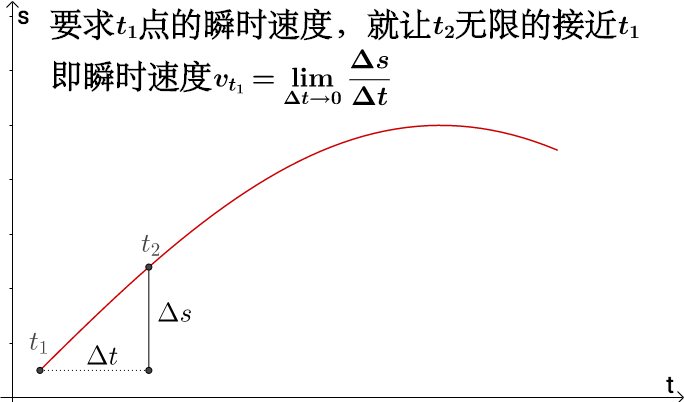
当 t1无限趋近于t0时,汽车行驶的快慢变化就不会很大,平均速度就近似等于t0时刻的瞬时速度,因而就把此时的极限 作为汽车在时刻t0的瞬时速度,即 ,这就是通常所说的速度。这实际上是由平均速度类比到瞬时速度的过程 (如我们驾驶时的限“速” 指瞬时速度)。
,这就是通常所说的速度。这实际上是由平均速度类比到瞬时速度的过程 (如我们驾驶时的限“速” 指瞬时速度)。
导数另一个定义:当x=x0时,f’(x0)是一个确定的数。这样,当x变化时,f’(x)便是x的一个函数,我们称他为f(x)(关于x)的导函数(derivative function),简称导数。
物理学、几何学、经济学等学科中的一些重要概念都可以用导数来表示。如:导数可以表示运动物体的瞬时速度和加速度(就直线运动而言,位移关于时间的一阶导数是瞬时速度,二阶导数是加速度),可以表示曲线在一点的斜率,还可以表示经济学中的边际和弹性。
以上说的经典导数定义可以认为是反映局部欧氏空间的函数变化。为了研究更一般的流形上的向量丛截面(比如切向量场)的变化,导数的概念被推广为所谓的“联络”。有了联络,人们就可以研究大范围的几何问题,这是微分几何与物理中最重要的基础概念之一。
注意:1.f’(x)<0是f(x)为减函数的充分不必要条件,不是充要条件。
2.导数为零的点不一定是极值点。当函数为常值函数,没有增减性,即没有极值点。但导数为零。(导数为零的点称之为驻点,如果驻点两侧的导数的符号相反,则该点为极值点,否则为一般的驻点,如 中f’(0)=0,x=0的左右导数符号为正,该点为一般驻点。)
求导方法(定义法):
①求函数的增量 ;
②求平均变化率;
③取极限,得导数。
如何理解导数的概念 ?
先简短地回答下我对“什么是导数”的认识:导数是用来找到“线性近似”的数学工具。
下面我来解释一下,为什么我是这样认为的。
在我学习微积分的过程中,我对导数的认知经历了三次变化:
导数是变化率、是切线的斜率、是速度、是加速度
导数是用来找到“线性近似”的数学工具
导数是线性变换
我认为第一种认知比较片面,在多元函数的情况下甚至是错误的。第二种认知更接近微积分的本质,第三种认知是为了实现第二种认知发展出来的。
因为种种原因,我们的学习都是从第一种认知开始的。我会在本文分别介绍一下这三种认知。最后会通过第三种认知回答“多元微积分中,可微函数的切线为什么会共面(此平面即切平面)?”
1 导数是变化率、是切线的斜率、是速度、是加速度
1.1 但是!
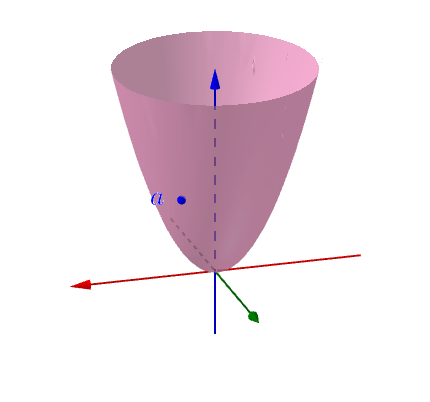
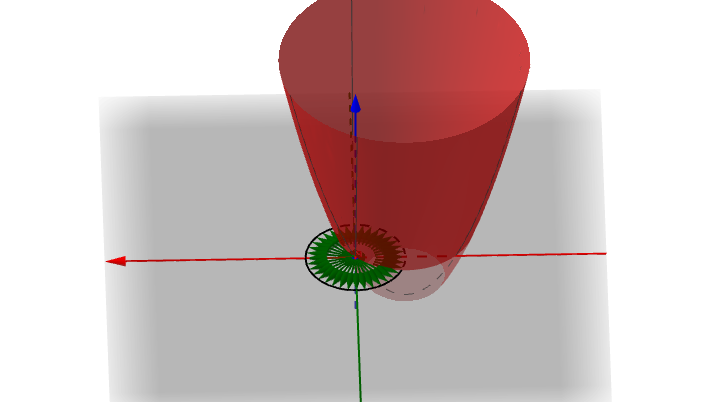
在曲面上可以做无数条过a点的曲线(图上随便画了三根):
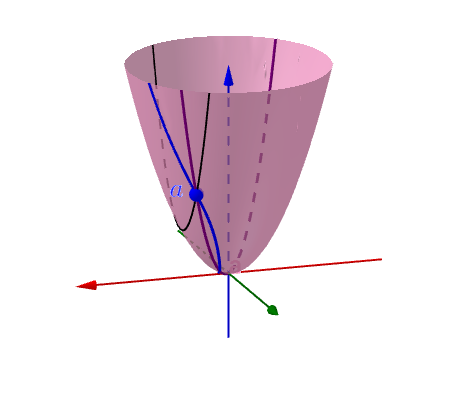
把导数看作是变化率、是切线的斜率,在多元函数中是片面的,甚至是不正确的。我们必须要重新审视“导数是什么”这个问题。顺便说一下,把导数继续看作变化率,切线的斜率,可以得到偏导数、方向导数、全导数,可以参看我之前写过的一个回答: 什么是全导数? 。
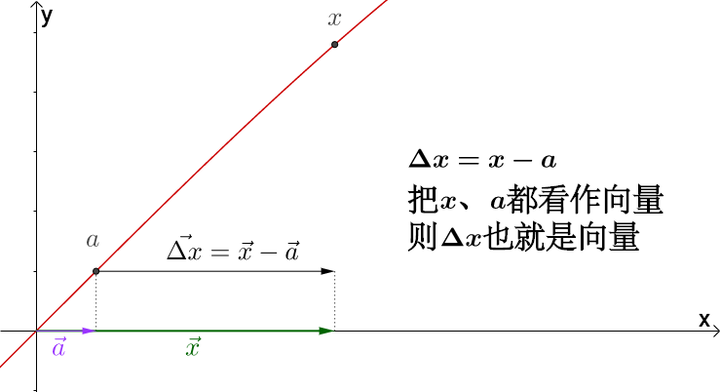
2 导数是用来找到“线性近似”的数学工具
微积分的基本思想是“以直代曲”:
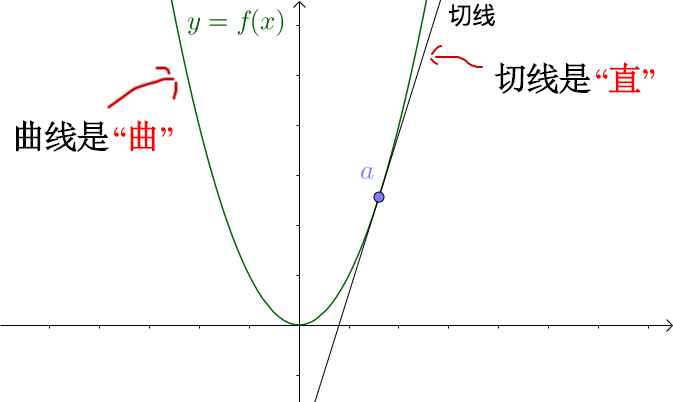
以直代曲”的意思就是,切线可以在切点附近很好的近似曲线:
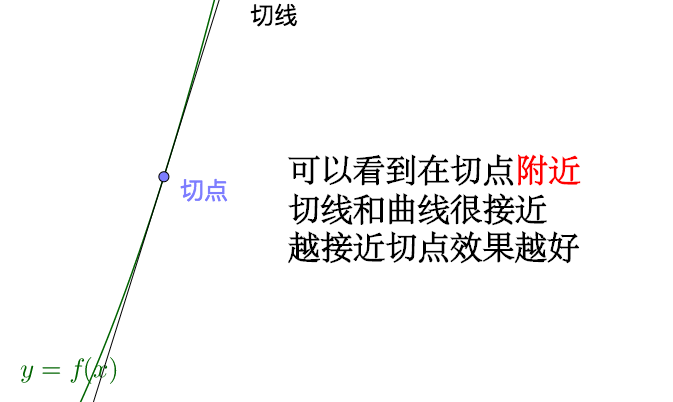
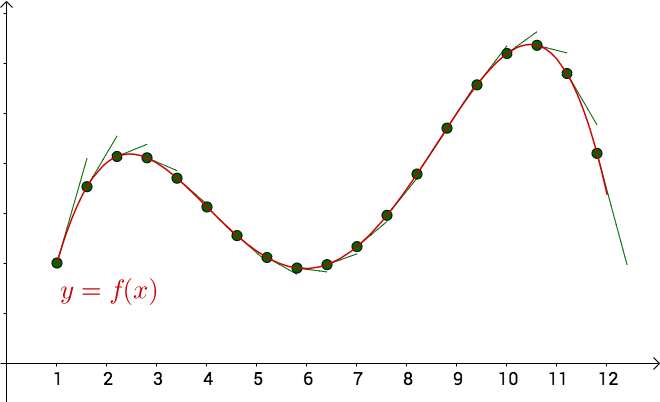
这里我希望给你一个直观印象,切线可以在切点附近很好的近似曲线。如果仔细看泰勒公式、洛必达法则等,还会通过代数发现这一事实。
2.2 导数是用来找到“线性近似”的数学工具
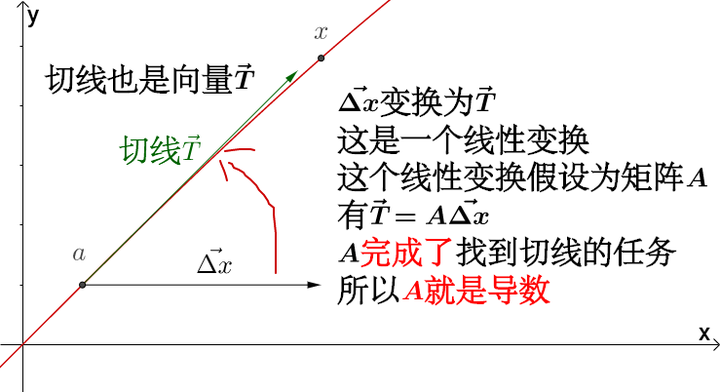
3 导数是线性变换
3.1 二元函数的“线性近似”
导数最主要的目的是找到“线性近似”,在一元函数的时候是要找到切线,在二元函数的时候是要找到一个切平面(可以参考我之前的回答: 如何理解全微分? ):
3.2 线性变换
对线性代数不熟悉的话,可以先看下我之前的回答 什么是仿射变换? 。
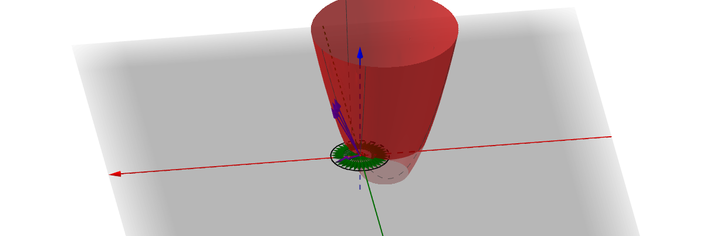
上图的\vec{\Delta x}指向右边,实际上求出的A是右导数,我换个方向就可以求出左导数:
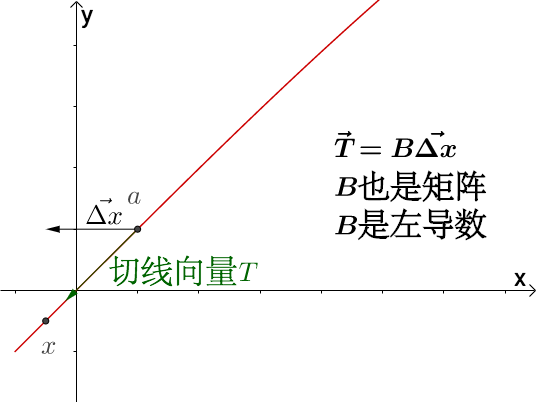
如果A=B,相当于左右导数相等,我们就称为此点可导。
顺便说一句,此时在 a 点附近同样也有 f(x)\approx f(a)+A\Delta x 。
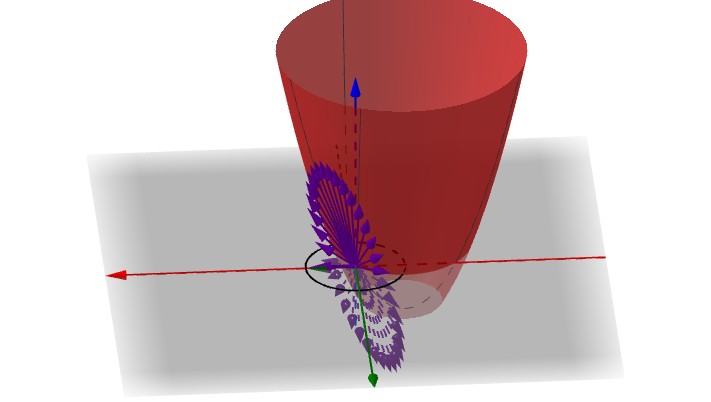
二元函数的时候,\vec{\Delta x}有无数的方向(不像一元的时候只有左右两边):
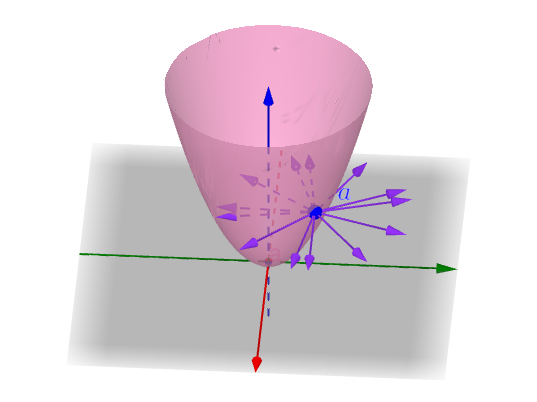
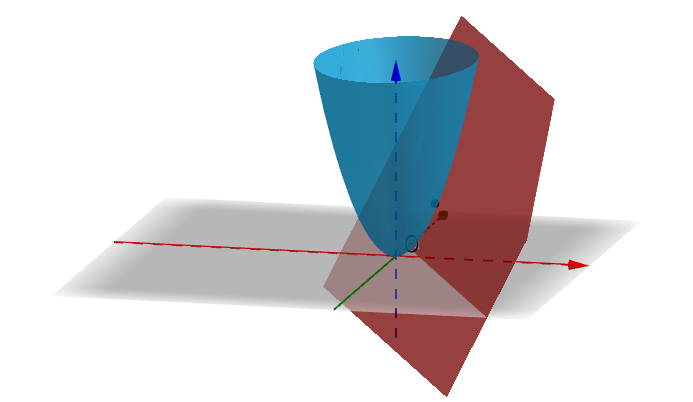
3.3 通过导数A来找到切平面
因为此点可导,即所有的\vec{\Delta x}的导数都是A,所以变换后的结果也共面(线性变换的特点是,变换前是共面的,变换后也是共面的):
看看动画吧(可以旋转视角来观察):
对所有的\vec{T}=A\vec{x}+\vec{a}的都进行 A 变换,实际上就得到了切平面:
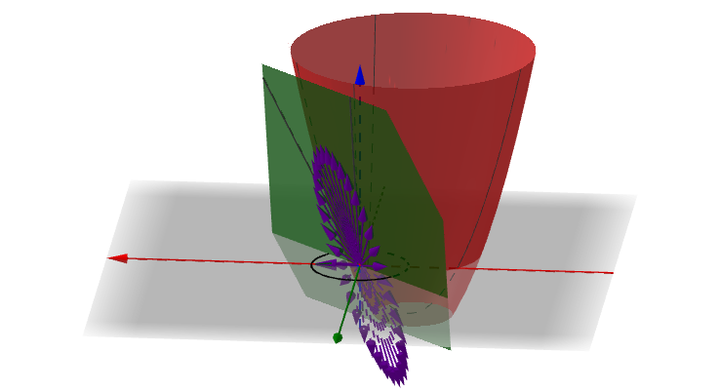
至此,导数完成了找到“线性近似”的任务。这里也很自然的回答了“多元微积分中,可微函数的切线为什么会共面(此平面即切平面)?”注意,有一点需要特别说明的是,因为矢量的起始点要求是在原点,但是我上面把起始点放在a点了,所以实际上是仿射变化,所以实际上\vec{T}=A\vec{x}+\vec{a}, A 仍然是导数。